了解一下激光焊缝跟踪在多层多道焊接中的应用
- 分类:公司新闻
- 作者:
- 来源:
- 发布时间:2019-07-08
- 访问量:0
【概要描述】
随着道路交通、海洋工程、特种船舶等工业领域的快速发展,我国对中厚板焊接的需求也越来越大。在中厚板的焊接中,多层多道焊是常用的焊接方法之一。例如在船舶制造领域,我国造船焊接工作量十分巨
了解一下激光焊缝跟踪在多层多道焊接中的应用
【概要描述】
随着道路交通、海洋工程、特种船舶等工业领域的快速发展,我国对中厚板焊接的需求也越来越大。在中厚板的焊接中,多层多道焊是常用的焊接方法之一。例如在船舶制造领域,我国造船焊接工作量十分巨
- 分类:公司新闻
- 作者:
- 来源:
- 发布时间:2019-07-08
- 访问量:0
【摘要】:随着道路交通、海洋工程、特种船舶等工业领域的快速发展,我国对中厚板焊接的需求也越来越大。在中厚板的焊接中,多层多道焊是常用的焊接方法之一。例如在船舶制造领域,我国造船焊接工作量十分巨大,焊接自动化程度低、焊接质量不稳定和生产效率低。
随着道路交通、海洋工程、特种船舶等工业领域的快速发展,我国对中厚板焊接的需求也越来越大。在中厚板的焊接中,多层多道焊是常用的焊接方法之一。例如在船舶制造领域,我国造船焊接工作量十分巨大,焊接自动化程度低、焊接质量不稳定和生产效率低。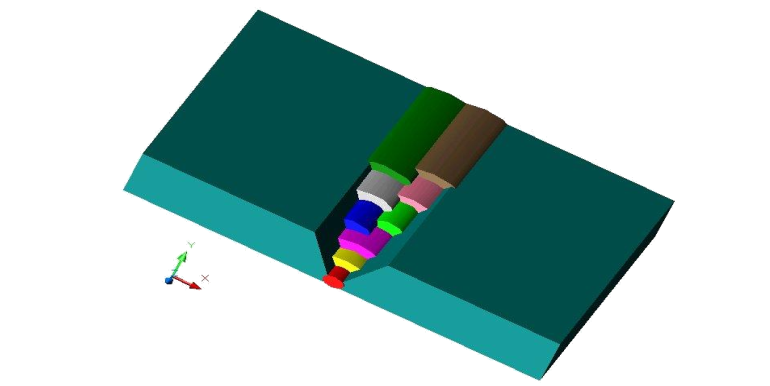
目前中厚板多层多道焊的主要问题是:随着焊接层数的增加,坡口实际情况与预计的状态相差越来越大,而目前的焊接机器人无法对这种变化及时做出反馈。当焊接进行到一定程度时,预先设定的焊接工艺和焊接轨迹就不再适应当前工件的实际焊接状态,导致焊接无法继续进行。除此之外在中厚板焊接过程中,工件焊缝的实际位置可能产生较大偏差,焊接过程热变形较大等也会对焊缝位置产生影响。
多层多道焊接激光焊缝跟踪及检测系统,采用大景深激光视觉传感器,实现了:
1. 焊接过程中的焊缝跟踪;
2. 多层多道自动排列焊道;
3. 焊道自动切换,包括焊枪的左右和高低;
4. 更多定制的功能。
扫二维码用手机看

焊缝跟踪不用愁
有啥问题找睿牛!
地址:苏州市昆山市浩盛工业园
座机:0512-80171802 / 0512-80171805
联系人:张先生 18626329319
邮箱:zhangxiangfeng@renue.com.cn
传真:0512-80171801
网址:www.renue.com.cn
Copyright © 2020 苏州睿牛机器人技术有限公司 All rights reserved 苏ICP备18033221号-1



