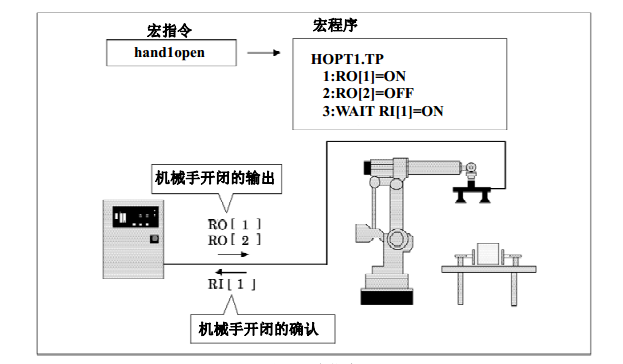
宏指令具有如下功能:
可在程序中对宏指令进行示教而作为程序指令启动。
可从示教器的手动操作画面启动宏指令。
可通过示教器的用户键来启动宏指令。
在程序复杂的情况下,使用宏指令可以大大简化程序行数,增加代码可读性哦
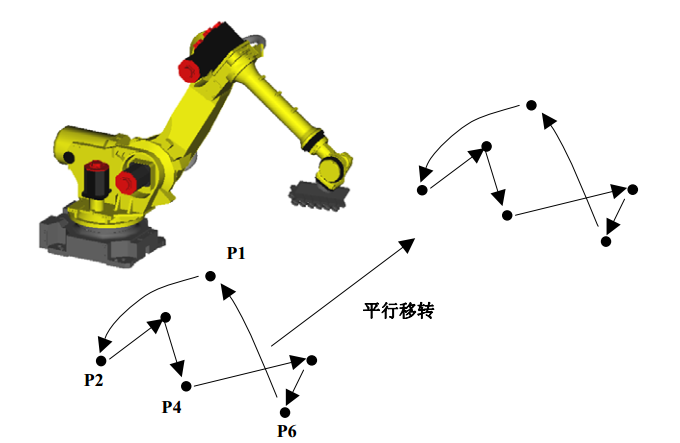
移转功能
移转功能执行如下操作:
相对现有的程序总体或者某个范围,使动作语句中的位置数据移转并变换。
将执行了移转变换后的结果,输入新的程序或现有的程序。
相对别的程序,反复执行相同的移转变换
变换后的位置数据,具有如下规则。
位置数据
基于直角坐标值的位置数据被变换为直角坐标值,基于关节坐标值的位置数据被变换为关节坐标值。
关节坐标位置数据在变换后成为轴可动范围外的值时,作为未示教值而被存储起来。直角坐标位置数据,原样存储变换值。
位置寄存器的位置数据不予变换。
伴随增量指令的动作语句的、基于关节坐标值的位置数据作为未示教值而被存储起来
此功能适用范围非常灵活,码垛,装配,睿牛焊缝跟踪及多层多道都可以涉及到哦!
坐标系更换移转功能
坐标系更换移转是这样一种功能,它就已经示教的程序的某一范围的动作语句,更改工具坐标系(TOOL)和用户坐标
系,考虑到变换前的坐标系和变换后的坐标系的移转量,变换位置数据,以使 TCP 成为相同位置。
坐标系更换移转
坐标系更换功能执行如下操作:
针对现有的程序总体或某一范围,更改动作语句中的位置数据(直角坐标值)中的工具坐标系号码或用户坐标系。
位置数据为关节坐标值时,考虑到工具更换或用户坐标系更换引起的移转量而变换值。
将执行了移转变换后的结果,输入新的程序或现有的程序。
相对别的程序,反复执行相同的移转变换。
此功能应用广泛,也是机器人视觉的基本工具之一哦。变换后的位置数据,具有如下规则。
位置数据
基于直角坐标值的位置数据被变换为直角坐标值,基于关节坐标值的位置数据被变换为关节坐标值。
关节坐标位置数据在变换后成为轴可动范围外的值时,作为未示教值而被存储起来。直角坐标位置数据,原样存储变换值。
位置寄存器的位置数据不予变换。
伴随增量指令的动作语句的、基于关节坐标值的位置数据作为未示教值而被存储起来
此功能适用范围非常灵活,码垛,装配,睿牛焊缝跟踪及多层多道都可以涉及到哦!
坐标系更换移转功能
坐标系更换移转是这样一种功能,它就已经示教的程序的某一范围的动作语句,更改工具坐标系(TOOL)和用户坐标
系,考虑到变换前的坐标系和变换后的坐标系的移转量,变换位置数据,以使 TCP 成为相同位置。
坐标系更换移转
坐标系更换功能执行如下操作:
针对现有的程序总体或某一范围,更改动作语句中的位置数据(直角坐标值)中的工具坐标系号码或用户坐标系。
位置数据为关节坐标值时,考虑到工具更换或用户坐标系更换引起的移转量而变换值。
将执行了移转变换后的结果,输入新的程序或现有的程序。
相对别的程序,反复执行相同的移转变换。
此功能应用广泛,也是机器人视觉的基本工具之一哦。




